Software provides 3D robot state estimation through sensor fusion for Robot Operating System
Charles River Analytics, a developer of intelligent systems solutions, announces the release of state estimation software for the Robot Operating System (ROS). ROS is an open-source framework for robotics that has been widely adopted across academia, industry, and the military. Charles River’s robot_localization ROS package provides full 3D robot state estimation through sensor fusion.
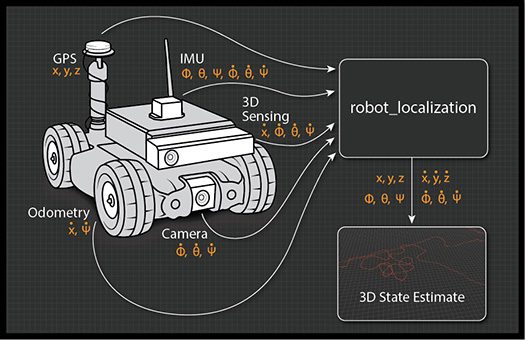
“Our robot_localization package enables users to fuse inputs from an unlimited number of sensors to produce a state estimate that comprises the robot’s pose and velocity in 3D space,” explained Tom Moore, a lead software engineer at Charles River. “We designed it with ultimate flexibility in mind, providing the user the ability to tailor the input parameters to suit their specific needs.”
![]() Existing ROS software restricts the number of sensor inputs, thereby unnecessarily limiting the overall accuracy of the robot’s position estimate. Features of Charles River’s new software include:
Existing ROS software restricts the number of sensor inputs, thereby unnecessarily limiting the overall accuracy of the robot’s position estimate. Features of Charles River’s new software include:
- Fusion of any number of sensor inputs in estimating the robot’s state. Per-sensor input customization allowing users to exclude unwanted data in a sensor message from a state estimate. This allows users to fuse sensor messages whose data is incomplete without corrupting the state estimate.
- Continuous estimation of the robot’s state, beginning when it receives an initial measurement and continuing, using a kinematic model, even during periods when no data is received. Continuous estimation is critical to the accurate functioning of higher level tools such as robot path planning and control.
- Support for multiple ROS message types, including odometry, IMU, pose, and velocity (twist) messages.
Rich Wronski, Division Vice President, Sensor Processing and Networking, said, “The release of our open-source state estimation software reflects our ongoing commitment to collaborate across the robotics community to advance the state-of-the-art in robotics.”
The robot_localization software is hosted on GitHub. It is also available as Ubuntu packages for ROS Groovy Galapagos, ROS Hydro Medusa, and the forthcoming ROS Indigo Igloo.
For more information, visit the robot_localization ROS wiki page at http://wiki.ros.org/robot_localization or contact us.


