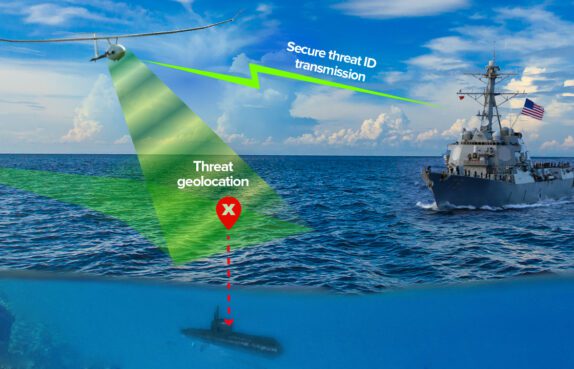
MAGNETO
A system to detect and classify submarines using their magnetic signals

A system to detect and classify submarines using their magnetic signals
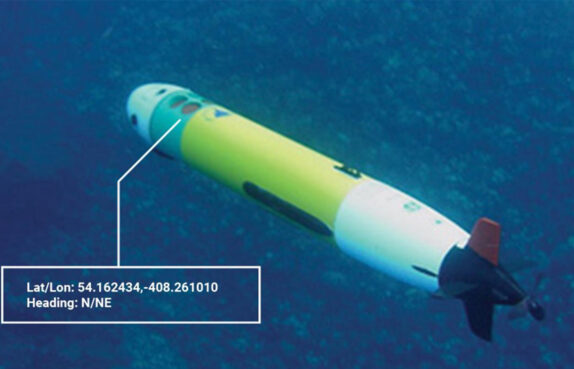
A small, inexpensive, and low-powered navigation system for unmanned vehicles without GPS
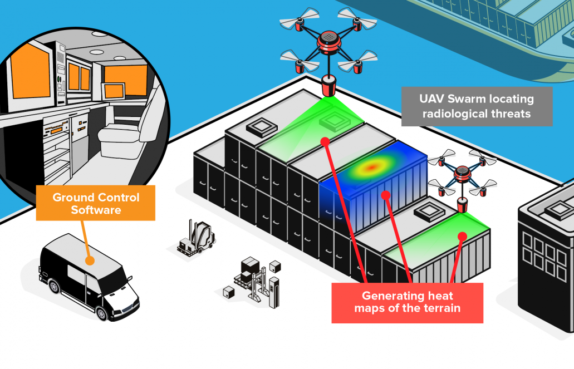
A system to survey, detect, and localize nuclear threats in challenging and dynamic public spaces
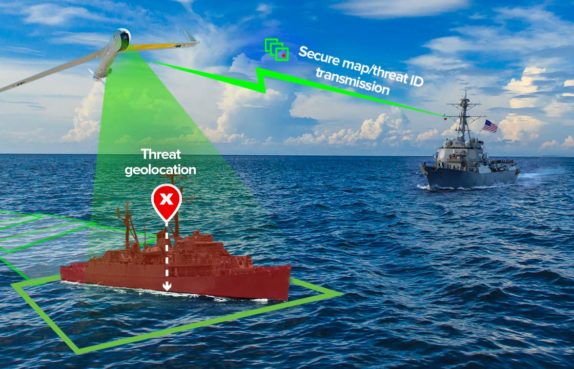
Real-time ortho-mosaics for maritime situational awareness and navigation

A portable lightweight sensor platform
A maritime traffic awareness solution for an unmanned surface vessel