
PAVE
An Awarion®-powered AI system to improve USV harbor escort missions

An Awarion®-powered AI system to improve USV harbor escort missions
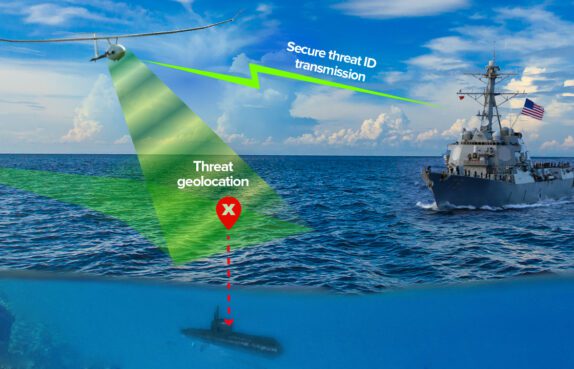
A system to detect and classify submarines using their magnetic signals

A tool to help air traffic controllers communicate effectively in noisy environments

A multicamera system that ensures safer operations using machine learning

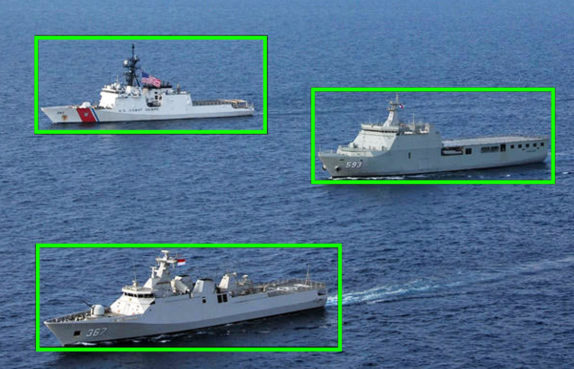
Maritime object identification and optical character recognition for situational awareness
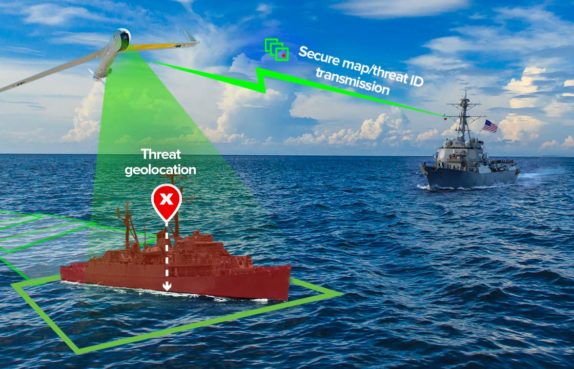
Real-time ortho-mosaics for maritime situational awareness and navigation

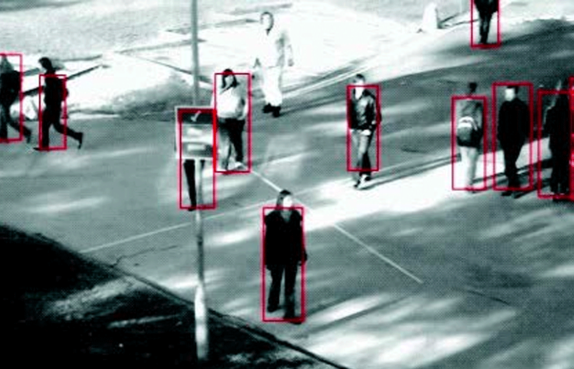
A system to track nuclear threats in urban environments

Role and task-tailored interfaces for mission planning
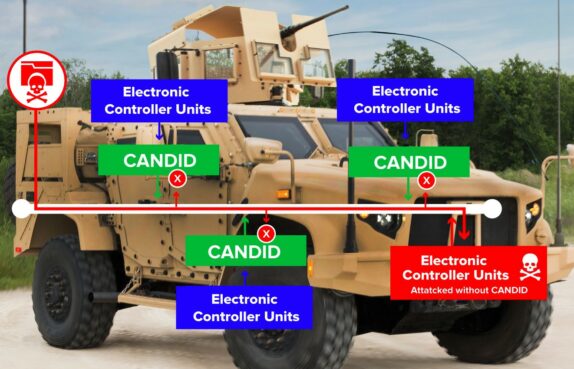
A system that detects and prevents cybersecurity breaches in military ground vehicles
A library of computer vision processing tools

A platform for prototyping solutions on physiological, neurological, and behavioral state
A maritime traffic awareness solution for an unmanned surface vessel