
TOOL-VAN
A system for easier deep learning verification to build confidence in autonomous systems

A system for easier deep learning verification to build confidence in autonomous systems
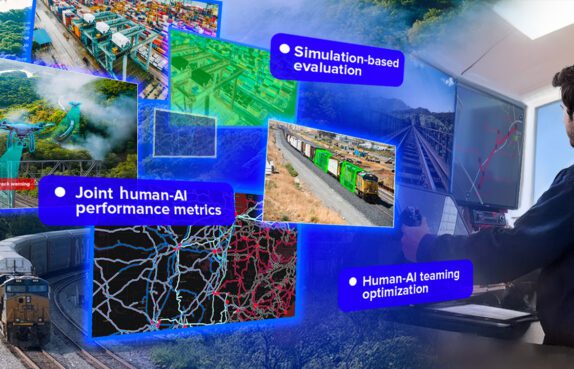
A testing framework to improve railroad safety through human-AI interaction analysis

Human-robot interface to build trust and interpret speech, gestures, and gaze

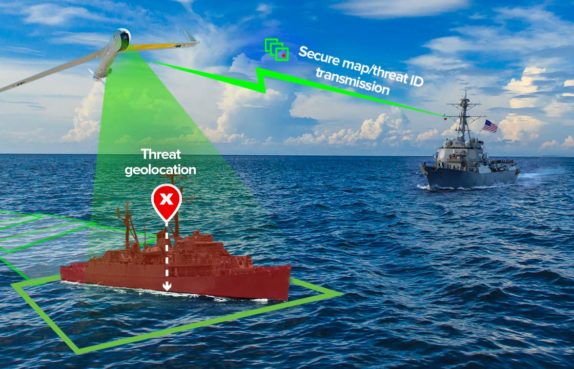
An Awarion®-powered AI system to improve USV harbor escort missions
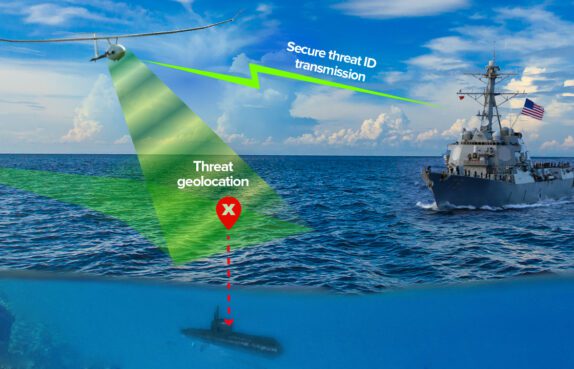
A system to detect and classify submarines using their magnetic signals

A tool integrating hierarchical protocols with command-and-control of uncrewed systems

A robotic medical triage system that aids medics during a mass casualty incident
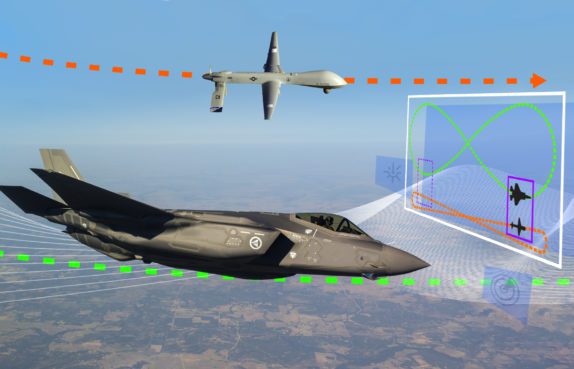
An enhanced crewed–uncrewed team communication prototype for complex settings

A multicamera system that ensures safer operations using machine learning

Maritime object identification and optical character recognition for situational awareness

Monitor health and status of critical systems with machine-learning technologies
Software that enables UASs to safely conduct wildlife survey operations

An AI-based maintenance system that keeps robotic combat vehicles mission ready
A system to explore cooperation and behavior allocation of autonomous teams
A small, inexpensive, and low-powered navigation system for unmanned vehicles without GPS
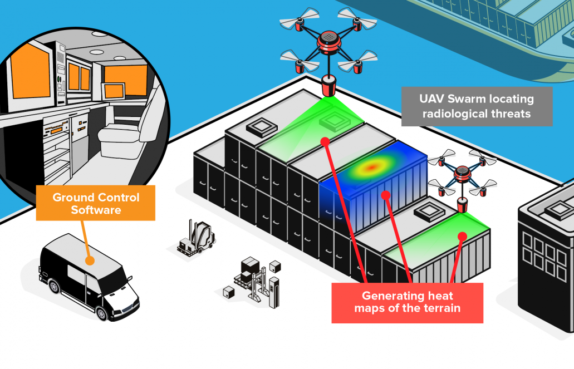
A system to survey, detect, and localize nuclear threats in challenging and dynamic public spaces
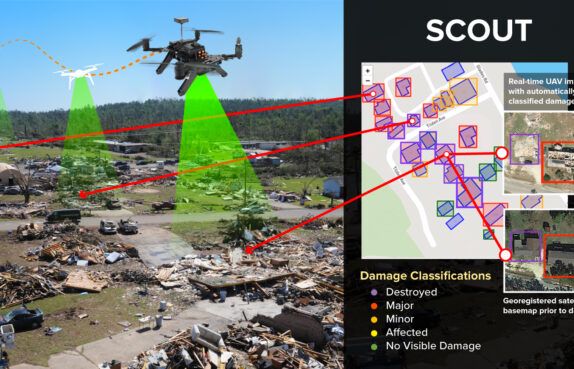
A system to detect and characterize natural disaster damage

A compact system for autonomously tracking and following
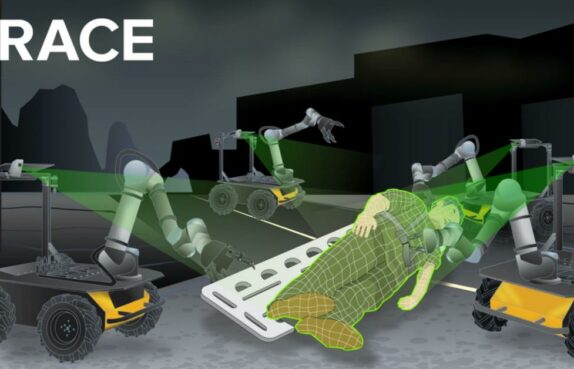
An autonomous robot collaboration toolkit to keep combat medics safe
Real-time ortho-mosaics for maritime situational awareness and navigation

Onboard AI for uncrewed surface vehicles

A tool to help medics monitor patients, diagnose injuries, and provide treatment

An immersive AR/VR space training platform
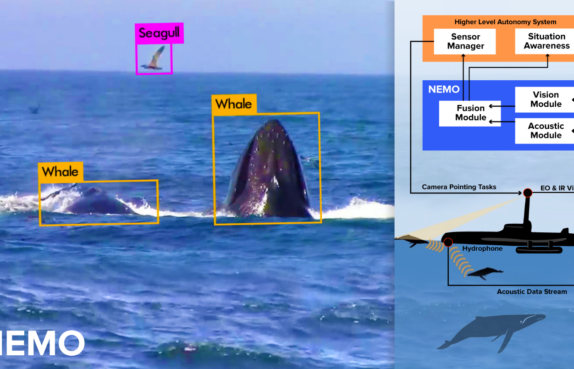
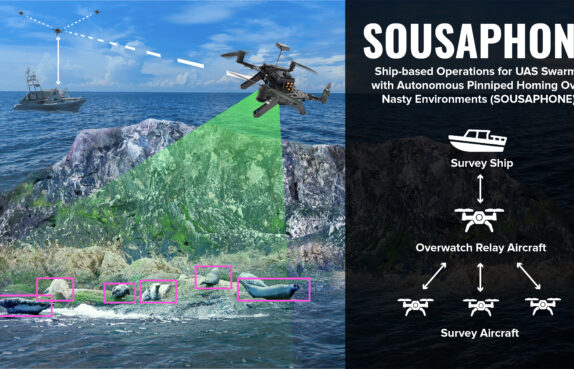
Autonomous system for detection and classification of ships and marine mammals

A system to track nuclear threats in urban environments

An infrastructure for increasing the resilience of US Navy Ships

A portable lightweight sensor platform
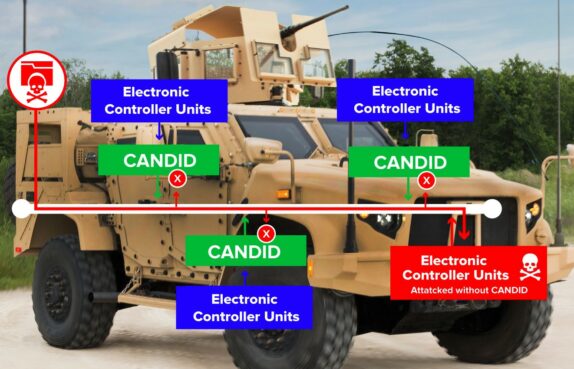
A system that detects and prevents cybersecurity breaches in military ground vehicles

Swarm tactics to provide heterogeneous swarms of unlimited size with resilient swarm behavior in urban operations

Probabilistic Reasoning for System Components Onboard US Naval Vessels

A decoy to deter specific tortoise predator species

Probabilistic representation of intent commitments to ensure software survival
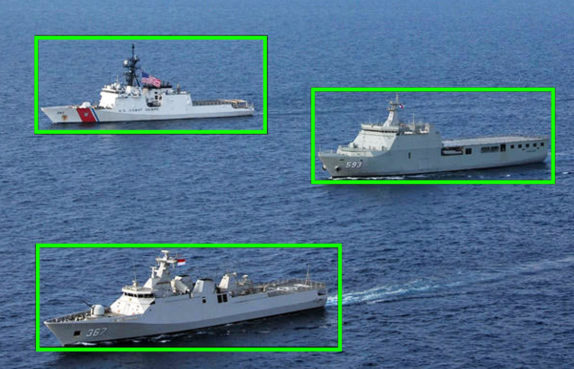
A maritime traffic awareness solution for an unmanned surface vessel