
MIN-COST
Onboard AI for uncrewed surface vehicles
Onboard AI for uncrewed surface vehicles
Management of Intelligent Navigation for Condition-based Ocean Safe Transit (MIN-COST)
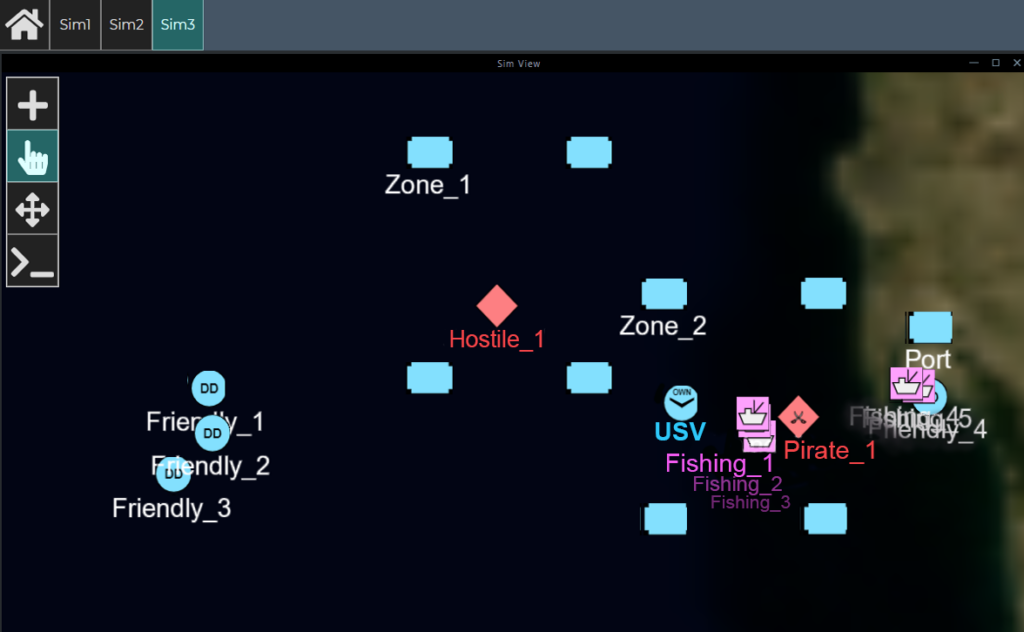
USVs in shipping lanes or active fishing zones must be visible to prevent collisions. But when in open waters, USVs may need to hide to avoid pirates or vessels from hostile nations. Though the required actions could be controlled by a remote operator, such active communications increase the risk of exposure, potentially jeopardizing the mission and ending in tracking or capture.
To help the Navy safely navigate these conflicting requirements, Charles River Analytics is developing MIN-COST, an onboard AI system that can autonomously determine the risks of exposure and adapt behavior in response to the USV’s surroundings.

“In the next ten years, more and more Navy and commercial vessels will depend on AI systems. To navigate safely, these systems will need to make decisions autonomously when communication with human operators isn’t possible.”

Dr. Arjuna Balasuriya,
Senior Marine Scientist and Principal Investigator of the MIN-COST effort
MIN-COST is designed to be active throughout a mission, from pre-launch through execution. Before launching the USV, a human operator enters mission goals, a library of plans, and operating parameters. During the mission, MIN-COST uses real-time sensor data and forecasting models to build behavior tables comprising recommended tactics for dealing with potential threats to the USV. When a threat is encountered, MIN-COST selects tactics based on the operating parameters, the severity of the threat, and the behavior tables. If the selected tactics conflict, MIN-COST uses optimization algorithms to choose the best course of action. For example, a request to avoid a potential collision by slowing down may conflict with the speed needed to reach the next mission waypoint. MIN-COST determines that avoiding a collision is more important than reaching the mission waypoint on time and selects a reduction in speed as the best course of action.
During the first phase of the MIN-COST project, Charles River developed the optimization algorithms and behavior-based autonomy engine that will be integrated into a full-scale prototype using the recently awarded additional funding.
“MIN-COST’s adaptability and versatility make it a critical technology for the rapidly growing industry of uncrewed marine vehicles,” said Housten. The technology may eventually appear on other vessels; hundreds of thousands of recreational boats populate US waters, and the team at Charles River envisions adapting MIN-COST to assist these boats with collision avoidance.
Contact us to learn more about MIN-COST and our other capabilities in robotics and utonomy and optimization and automated planning.
This material is based upon work supported by Naval Sea Systems Command under Contract No. N6833522C0065. Any opinions, findings and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of Naval Sea Systems Command.