
HIEROPHANT
A tool integrating hierarchical protocols
with command-and-control of uncrewed systems
A tool integrating hierarchical protocols with command-and-control of uncrewed systems
Hierarchical Optimized Planning with Heterogeneous Autonomous Network of Tactics (HIEROPHANT)
As the US military integrates more autonomous systems into its ranks, it must do so in the context of existing command-and-control (C2) structures. Ensuring that new uncrewed systems (UxSs) play well and conform to hierarchical protocols is not easy, but Charles River Analytics is addressing the challenge.

The Office of Naval Research awarded Charles River Analytics a multi-year contract to prototype and evaluate Hierarchical Optimized Planning with Heterogeneous Autonomous Network of Tactics (HIEROPHANT), a tool that facilitates seamless integration of resilient and adaptable autonomous systems even in dynamic and communication-limited environments.
Militaries around the world fall into strict hierarchies, and those within these structures expect commands to be issued (and control exerted) in specific ways. Autonomous systems turn these expectations on their head.
“To ensure seamless integration, we need new types of thinking and reasoning for the AI system to be able to effectively integrate into these C2 hierarchies. Autonomous systems will also be easier to adopt if they fit into existing military protocols.”

Dr. James Niehaus
Principal Scientist and Principal Investigator on HIEROPHANT
A battlefield is dynamic, and the human warfighter is trained to adapt to changing conditions by reconfiguring traditional C2 structures to fit the needs of the situation on the ground. Machines, on the other hand, often can’t adapt quickly. They need very specific instructions and data on what to do—and when. “It’s a challenge for machines to reason in a decentralized manner when out conducting a mission, especially when they don’t always have perfect communications,” Niehaus says.
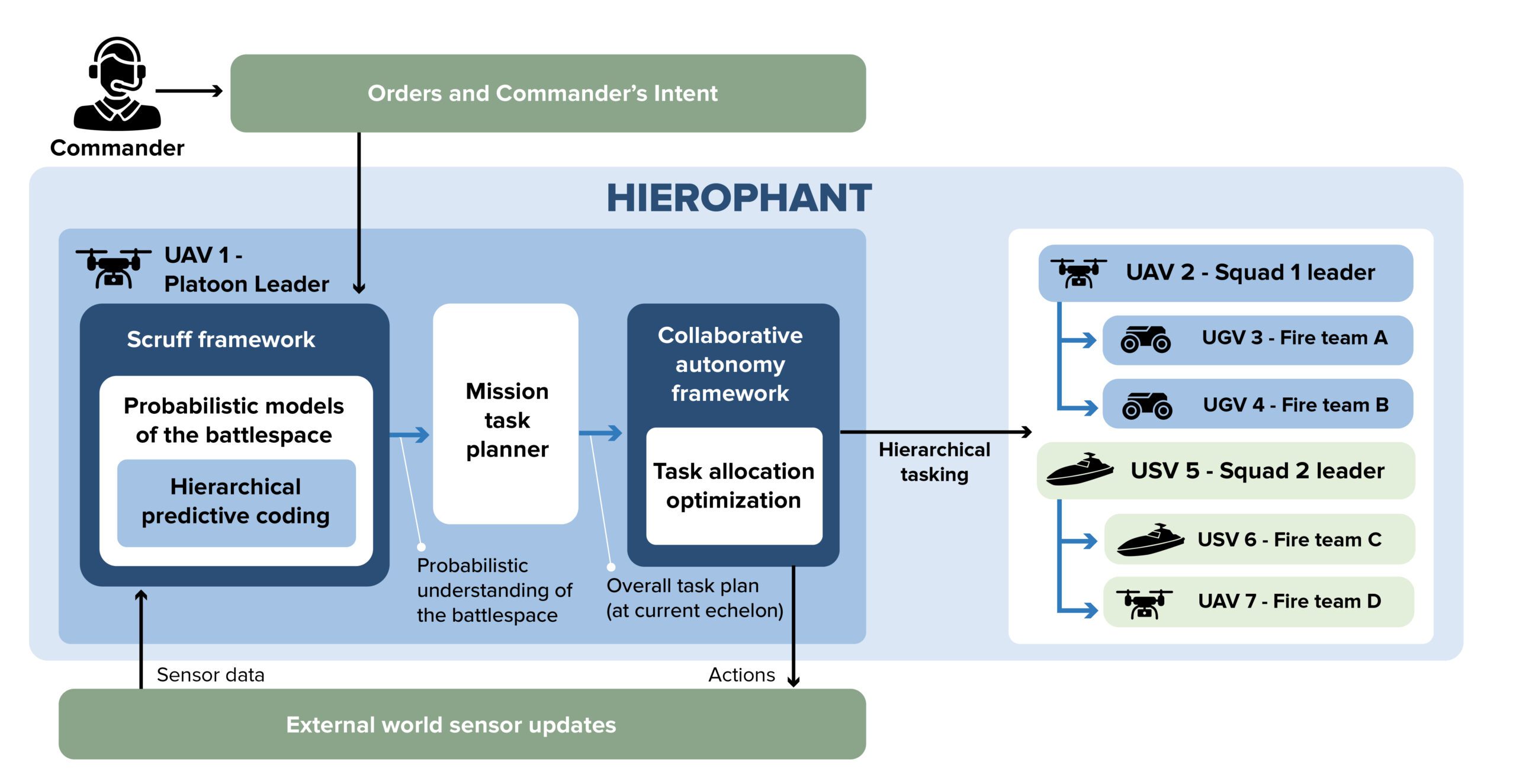
The HIEROPHANT tool comprises three solutions, each of which addresses a specific challenge:
- A Collaborative Autonomy Framework (CAF) provides reconfigurable and decentralized adaptation of C2.
- The Scruff™ probabilistic modeling framework enables inference about highly uncertain elements of the mission in communication-limited environments.
- A hierarchical predictive coding approach, which enables dynamic updating of mission information.
“Another challenge for autonomous units: modeling the fantastically complex real world. Updating models in real-time with current information is yet another obstacle that HIEROPHANT is aiming to overcome. Retasking decisions must be based on a unit’s capabilities and availability, but just getting that information can be very hard.”

Dr. Jeff Druce
Senior Scientist and Technical Lead on HIEROPHANT
“HIEROPHANT expertly combines many of our technologies that we have been working on for years in terms of planning, optimization, and probabilistic reasoning. And we’re applying this mix of capabilities—human–machine teaming, swarm robotics, probabilistic modeling, machine learning, and tactical AI—to an incredibly critical problem for the government in how to deploy autonomy at large,” Niehaus says.
The tool can also find applications in commercial settings. Emergency search-and-rescue operations with many logistical moving parts are ripe for implementation. “Whenever you’re organizing groups that could make use of autonomy, I think you’ll want to look at how you’re going to integrate the autonomy resources into the structures you have,” Niehaus says.
Contact us to learn more about HIEROPHANT and our other capabilities in robotics and autonomy and artificial intelligence.
This material is based upon work supported by the Office of Naval Research under Contract No. N00014-24-C-2404. Any opinions, findings and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the Office of Naval Research.