
CROWSNEST
A maritime traffic awareness solution
for an unmanned surface vessel
Compliance in Real-Time Onboard Watercraft for Safe Navigation using Environs-Modeling, Sensor-Fusion, and Tracking (CROWSNEST)
A growing number of adversaries have built submarines that could pose a serious threat to the US and its allies. The Defense Advanced Research Projects Agency (DARPA)’s Anti-Submarine Warfare (ASW) Continuous Trail Unmanned Vessel (ACTUV) program aims to address this potential threat through the development of an unmanned surface vessel (USV) that autonomously tracks submarines to minimize the threat of surprise actions.
Because safety is critical when operating USVs in any Navy mission, USVs must comply with the International Regulations for Preventing Collisions at Sea (COLREGS), the rules for safe navigation on the ocean. For USVs to comply with COLREGS, they must be aware of other ships in the vicinity, understand what types of ships they are, and reason about how those ships are behaving. This situation awareness can be difficult even for experienced mariners to achieve, but it is required for USVs to fulfill their promise of saving lives and decreasing costs associated with ASW missions.
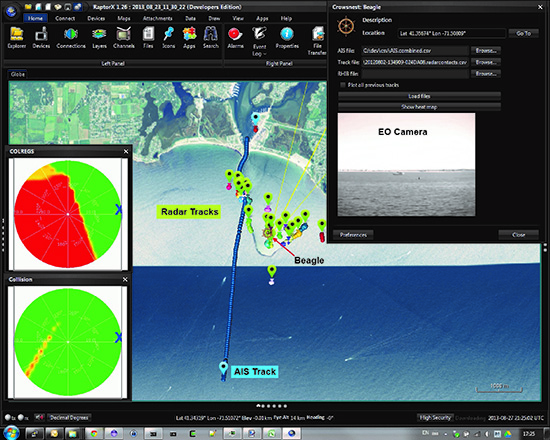
A bird’s-eye view of surface situation based on AIS, radar, and video sensors. On the left is a display of CROWSNEST’s understanding of collision risks and potential COLREGS violations.
“While ACTUV was following a submarine, CROWSNEST determined that a boat was approaching from starboard and would cross into ACTUV’s path. A simple application of COLREGS would have steered ACTUV to starboard to pass astern of the boat, but that path would have pulled ACTUV too far from the submarine to maintain contact. CROWSNEST resolved this issue by identifying a COLREGS-compliant path that turned to port and sped up, minimizing the risk of collision and COLREGS violation while maintaining contact with the sub.”

Ross Eaton,
Senior Scientist and Principal Investigator of the CROWSNEST effort
The Charles River Analytics Solution
As one of several teams selected for the ACTUV program, Charles River developed a sea traffic situation awareness component, called CROWSNEST, that uses multiple sensors to detect, classify, and track objects on the sea surface. The example figure shows Charles River’s data-driven object detection framework real-time results, based on data feeds provided by on-board electro-optical (EO) and infrared (IR) cameras. Detected ships are also classified into several classes, including sailboats and cargo ships, based on their visual appearance.
The first figure shows camera detections fused with Automatic Identification System (AIS) reports and radar detections to provide a cohesive picture of the sea surface. CROWSNEST builds on this instantaneous picture to predict future traffic flow, using particle filtering, probabilistic reasoning, and COLREGS rules. Based on this anticipated behavior, the USV can plan paths that avoid collisions and comply with COLREGS while maintaining contact with the submarine being followed.

Examples of ships detected by CROWSNEST
In this video, ships detected by CROWSNEST are marked in green. Day shapes, which indicate COLREGS status, are detected and marked in red.
The Benefit
On the water, CROWSNEST detected better than 90% of ships of all types and sizes in varying weather and lighting—a significant challenge in today’s cluttered maritime environment. Detected ships are classified by type with up to 80% accuracy. CROWSNEST has also used probabilistic reasoning to prevent collisions and ensure COLREGS compliance while completing simulated mission objectives.
Ross Eaton, Senior Scientist at Charles River, explained, “This system has applications beyond submarine warfare and unmanned vessels. CROWSNEST’s ship detection, classification, and tracking techniques can also enable valuable anti-piracy systems for commercial and private vessels. The COLREGS and collision reasoning component could ease the burden on human watch standers aboard military and commercial vessels, reducing danger at sea and eliminating collisions that cost lives and money. We’re excited to continue developing these capabilities in the next phase of ACTUV.”
Work performed under CROWSNEST was incorporated into our Awarion™ product.
Contact us to learn more about CROWSNEST and our other Robotics and Autonomy capabilities.
This material is based upon work supported by the SPAWARSYSCEN Atlantic under Contract No. N65236-12-C-3836. The views, opinions, and/or findings contained in this article/presentation are those of the author(s)/presenter(s) and should not be interpreted as representing the official views or policies of the Department of Defense or the U.S. Government. Distribution Statement “A” (Approved for Public Release, Distribution Unlimited)