
CAMINO
A small, inexpensive, and low-powered navigation
system for uncrewed vehicles without GPS
A small, inexpensive, and low-powered navigation system for uncrewed vehicles without GPS
Underwater Navigation System for US Navy
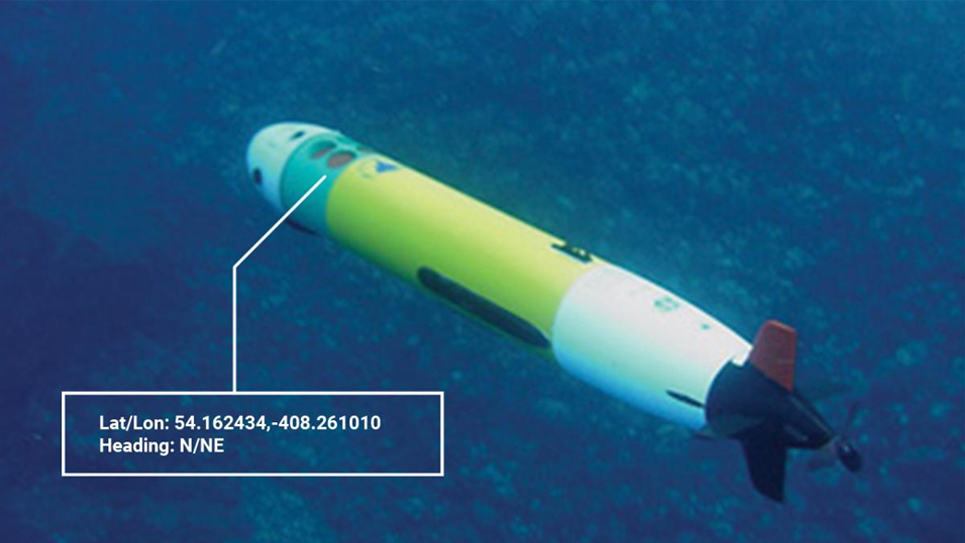
Charles River Analytics, a developer of intelligent systems solutions, is developing a system to improve high-accuracy underwater navigation for the US Navy. The system — dubbed CAMINO, or Combining Aiding Sensors with Multiple Inertial measurement units (IMUs) for Navigation Optimization — is designed to provide accurate localization at low size, weight, power, and cost (SWAP-C) to meet the platform requirements of small uncrewed underwater vehicles (UUVs). The development contract was awarded by the Office of Naval Research (ONR).
“The problem is that current UUVs aren’t able to navigate underwater reliably without prohibitively expensive inertial navigation systems (INS) onboard. CAMINO achieves accurate localization at much lower SWAP-C than current INSs. This accuracy can enable new types of missions for small UUVs, in an affordable package.”

Ross Eaton,
Principal Scientist and Principal Investigator of the CAMINO effort
Ross Eaton, Senior Scientist at Charles River, explained how CAMINO could help naval operations. “Whenever the Navy requires an underwater presence near the coast, there’s an increased risk of collision. Rather than risking a manned platform in crowded littoral waters, the Commander could send a small UUV to do the same job. The problem is that current UUVs aren’t able to navigate underwater very reliably without prohibitively expensive inertial navigation systems (INS) onboard. This is where CAMINO comes in. CAMINO achieves accurate localization at much lower SWAP-C than current INSs. This accuracy can enable new types of missions for small UUVs, in an affordable package.”
CAMINO achieves its performance by using a novel hierarchical particle filter to combine noisy measurements from multiple low-SWAP-C, noisy IMUs with direct observations from other sensors to generate an accurate estimate of UUV geolocation and orientation. VisionKit™, Charles River’s library of computer vision components, handles the signal processing and tracking tasks in CAMINO.
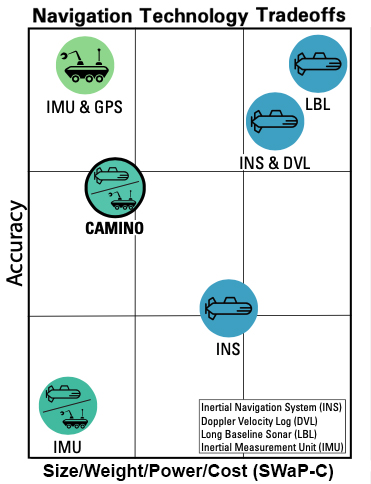
CAMINO delivers localization to within 0.44% of distance traveled at 20% the cost of standard inertial navigation systems
Compared to a standard INS, such as an iXBlue PHINS with a Workhorse DVL, CAMINO delivers:
- 60% power reduction – 16 W vs. 40 W
- 80% volume reduction – 364 in³ vs. 1,760 in³
- 80% weight reduction – 11 lbs vs. 55 lbs
- 80% cost reduction – $30,000 vs. $150,000
CAMINO is ideal for shallow-depth UUVs and man-portable UGVs that cannot support the size and power requirements of a full INS. CAMINO has been proven in both ground and underwater vehicles in GPS-denied environments and is TRL 7.

Contact us to learn more about CAMINO and our other autonomy capabilities.
This material is based upon work supported by The United States Navy under Contract No. N00014-11-M-0236.
Any opinions, findings and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of The United States Navy.