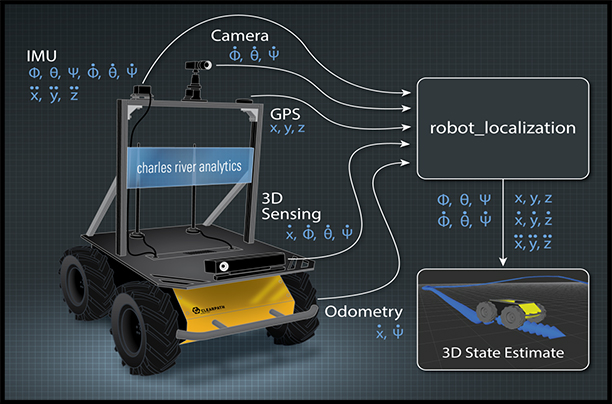
Charles River Analytics, a developer of intelligent systems solutions, announces the release of robot_localization 2.2.1, an open source software package for multi-sensor fusion. The software can be used to estimate the 3D pose, velocity, and linear acceleration of autonomous mobile robots.
“Version 2.2.1 of robot_localization includes a number of significant enhancements, including improved accuracy, improved efficiency, and the addition of diagnostics for simplified troubleshooting,” said Tom Moore, author of robot_localization. “Users have even tighter control over the behavior of the core state estimation algorithms, allowing for greater flexibility and wider applicability.”
To learn more, visit the robot_localization page.


