
To ensure safe passage, high-value assets such as Navy aircraft carriers require escorts when entering or exiting crowded harbors. The Perception Autonomy for Vessel Escorts (PAVE) system from Charles River Analytics automates the process to reduce the number of people required and increase the speed for each mission. This Small Business Innovation Research (SBIR) Phase II contract is sponsored by the Naval Sea Systems Command and is worth up to $1.8M.
While PAVE is not the first of its kind, current perception software for uncrewed surface vessels (USVs) are not able to conduct precise tracking of small vehicles or ones that move at relatively high speeds, particularly in crowded harbor environments. They’re also not able to characterize these potential threats effectively.
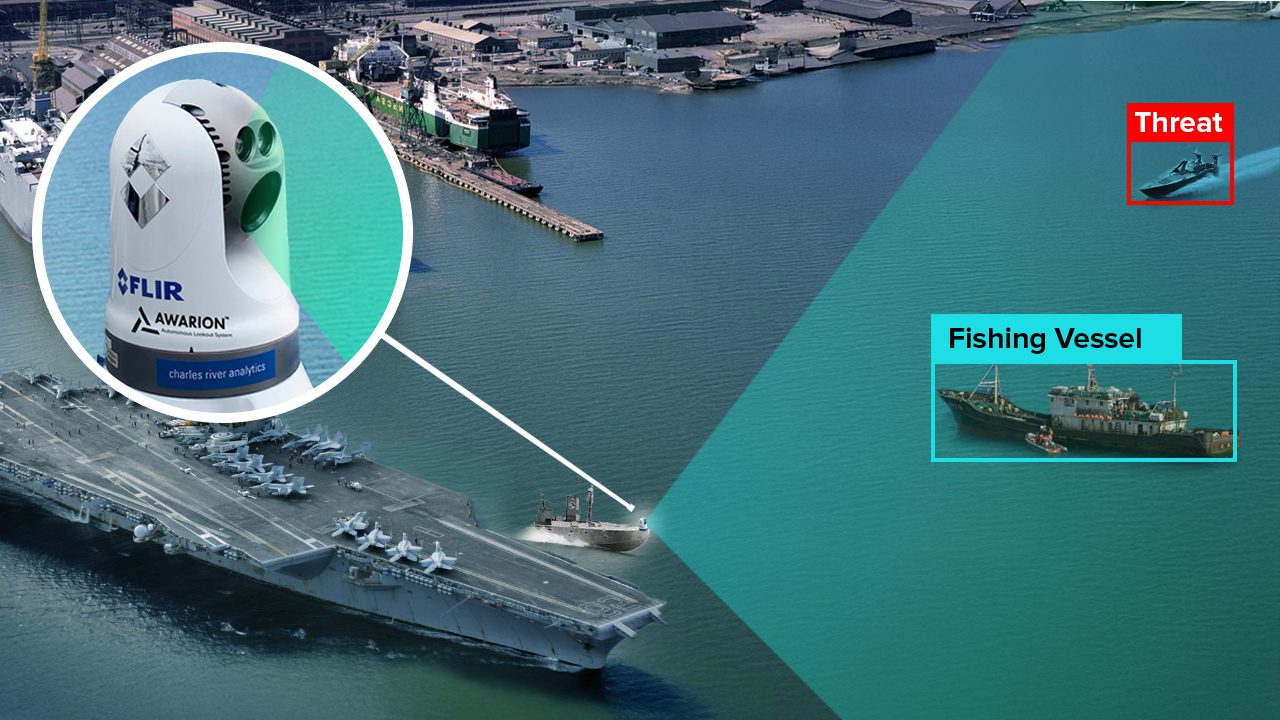
PAVE builds on Awarion®, our artificial intelligence (AI)–powered autonomous lookout system, which complements and supports human watchstanders and marine radar systems on the open seas. “Awarion detects, analyzes, and reports on the presence of whales, vessels, and other maritime objects in the open ocean, but we can adapt it to perform well in more crowded harbor scenarios,” says Ross Eaton, Principal Scientist, Director of Marine Systems, and Awarion product lead at Charles River. Such fine-tuning of Awarion means “with PAVE we can not only understand what and where something is, we can also make inferences about what that other boat might be doing so we can alert the appropriate personnel as needed,” adds Eaton. In addition, PAVE will be able to tell the distance of the various objects it detects.
In a busy harbor, there’s usually a lot happening in both the foreground and the background. While humans can easily distinguish between these various objects such as buildings and boats, the abundance of signals can confuse algorithms. Achieving humanlike perception in computer vision is a key challenge for PAVE to address. It is why, after successfully demonstrating the system’s feasibility in Phase I, Phase II will focus on supplying PAVE with a broader set of harbor-specific learning data, including new categories like piers and buildings. “We’re launching a more concerted effort to collect additional data that has more crowded backgrounds and congested scenes,” Eaton says.
PAVE uses electro-optical (EO) and infrared (IR) detection technology to “see” objects during both day and night. “Instead of having different people on different boats with all of them having only a partial view of the world, we’re building a cohesive picture, which will alert and issue warnings when something deserves a closer look. It makes the response more coordinated and faster. We want to leverage the strength of the human and automation to make an overall system that is as efficient as possible,” Eaton says.
Charles River expects the full-scope PAVE-enabled smart camera will have immediate benefits for the Maritime Expeditionary Security Force (MESF), as they continue to develop their uncrewed escort capabilities.
“I’m especially excited about PAVE because it demonstrates that we can meet and address a specific customer need and we can provide it faster and more affordably than they otherwise might have been able to access,” Eaton says.
There has been a lot of excitement for the product from the US Navy and in the private sector. Commercialization potential includes smaller USV platforms, embedded with PAVE, for a variety of harbor operations.
Contact us to learn more about PAVE, Awarion, and our other robotics and autonomy capabilities.
Related Articles and Publications
Charles River Analytics nets contract to enhance Naval situational awareness at sea
Army taps Charles River Analytics to develop personnel safety system for autonomous ground systems
Charles River Analytics Receives Follow-On Contract for Naval Detection of Marine Mammals
Machine Learning to Protect Whales – Sea Technology Magazine
Quantitative Assessment of Image Quality for Maritime Surveillance Applications
Maritime Border Security using Sensors, Processing, and Platforms to Detect Dark Vessels
This material is based upon work supported by the Naval Sea Systems Command under Contract No. N00024-24-C-S030. Any opinions, findings and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the Naval Sea Systems Command.



